Cascade#
Introduced in MORe v3.1
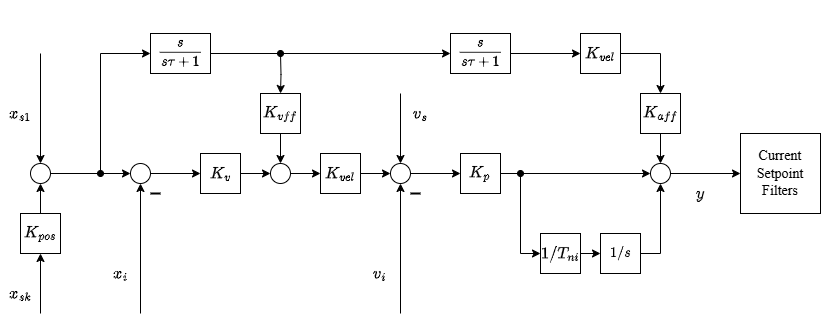
Represents a cascaded loop with a velocity loop and a position loop.
Block diagram#
Signal |
Description |
|---|---|
\(v_s\) |
Velocity setpoints |
\(x_s\) |
Position setpoints |
\(v_i\) |
Velocity feedback |
\(y\) |
Force/torque command value |
Controller gains#
Variable |
Units linear |
Units rotary |
Description |
|---|---|---|---|
\(K_v\) |
\(1/s\) |
\(1/s\) |
Proportional gain of the position controller |
\(K_p\) |
\(N s/m\) |
\(Nm s/rad\) |
Proportional gain of the velocity controller |
\(T_{ni}\) |
\(s\) |
\(s\) |
Integral time |
\(V_{ff}\) |
\(-\) |
\(-\) |
Velocity feed-forward gain |
\(\tau\) |
\(s\) |
\(s\) |
Cut-off frequency of derivative approximation |
Feedbacks#
Selected Entity#
Select “Link” to use a link output as feedback (direct feedback). If the controller contains a motor, an output of the motor can be selected (indirect feedback).
Link Output#
Only visible if selected entity is “Link”. Select a link to be used as feedback.
Velocity Loop Closed#
Disable to open the velocity feedback loop.
Position Loop Closed#
Disable to open the position feedback loop.